My work laptop provided by SURF, a Dell Pro 14 Premium, runs a custom Dell Ubuntu 24.04 ISO since otherwise half of the peripherals don’t work. Ubuntu 24.04 comes with PipeWire so I was curious if the Digiface would work with such a setup. Well, it does, albeit with some quirks.
First of all PipeWire also doesn’t get the outputs right. With the help of WirePlumber I could map channels 33 and 34 of the phones output to Front Left and Front Right. But then the next issue popped up: weird garbled, phasing, ringing audio. When using ALSA directly with Ardour this happened too so it’s not a PipeWire issue. Tried tweaking things first and also tried a recent Liquorix kernel. To no avail. Then I started trying out different buffer sizes using pw-metadata and noticed the phasing, ringing sound would go away when changing the buffer size. And I also noticed that the garbled sound would come back if I used a buffer size higher than 64. So with the use of WirePlumber I also set that now. Another owner reported that setting a higher sample rate also alleviates the issue. I still like to figure out though why I can’t use higher buffer sizes. I think it’s related to the USB topology of this laptop as I don’t have this issue on my own laptops.
The WirePlumber configuration file to remap the phones outputs can be found here: https://codeberg.org/autostatic/gists/src/branch/main/99-rme-digiface-usb.lua. Ubuntu 24.04 uses WirePlumber < 0.5.0 so it’s still in Lua format. You can place this file in ~/.config/wireplumber/main.lua.d/. And it starts with 99- for a reason, the interwebs suggest a lower number but then it gets overwritten by global configuration files.
Below the WirePlumber configuration file that I use on the Dell Pro 14 Premium with an extra property to work around the garbled audio issue.
To answer that question let’s assume the following:
You want to do real-time audio, for instance you would like to do an overdub in a song project by using a MIDI keyboard and a soft synth.
You’re using a USB audio interface.
You’re experiencing xruns when using lower buffer sizes (64 or even lower) that result in crackling audio.
Basically all components of a desktop computer or a laptop have an IRQ. Let’s say IRQs are some sort of communication lines between the brains of your computer (the CPU) and those components. All these communication lines are more or less the same as in, none of these communication lines has priority over the other. But if you suffer from bad audio quality caused by xruns then giving the communication line that is connected to your USB device more priority than the rest could alleviate the audio issues.
This is where rtcirqus could be helpful. What rtcirqus does is detecting your USB audio interface when it gets connected, then it figures out what the IRQ of the USB bus is that your audio interface is connected to and raises the priority of the IRQ attached to that USB bus. In other words, rtcirqus gives the communication line between the USB bus that your audio interface is connected to and the CPU of your computer a higher priority. This higher priority translates into other communication lines being throttled and giving the communication line of our USB audio interface more room to transfer and receive its audio data.
rtcirqus needs to be able to prioritize that communication line though and this is where the threadirqs kernel option is for, it creates so-called threads of all available IRQs on a computer. Threads are more or less like processes running on your computer, with threadirqs enabled you can list them as such with a command like ps -eLo cmd | grep '^[irq'. So make sure this kernel option has been added to the kernel command line. In case you’re using a real-time kernel this isn’t needed as a real-time kernel uses threaded IRQs by default.
So if you find yourself in such a situation, head over to https://codeberg.org/autostatic/rtcirqus and give rtcirqus a try, maybe it helps you achieving lower latencies with your USB audio interface while retaining a clean audio output signal.
With the release of the 6.12 kernel the RME Digiface USB is supported under Linux. Since this is a very portable device with lots of IO (32 in and 34 out) it got on my radar as a possible candidate for making recordings at my rehearsal space. It took a while before I stumbled upon a second hand unit but in the end I managed to find one nearby. Hooked it up to my notebook with an up-to-date Liquorix kernel and it worked out of the box.
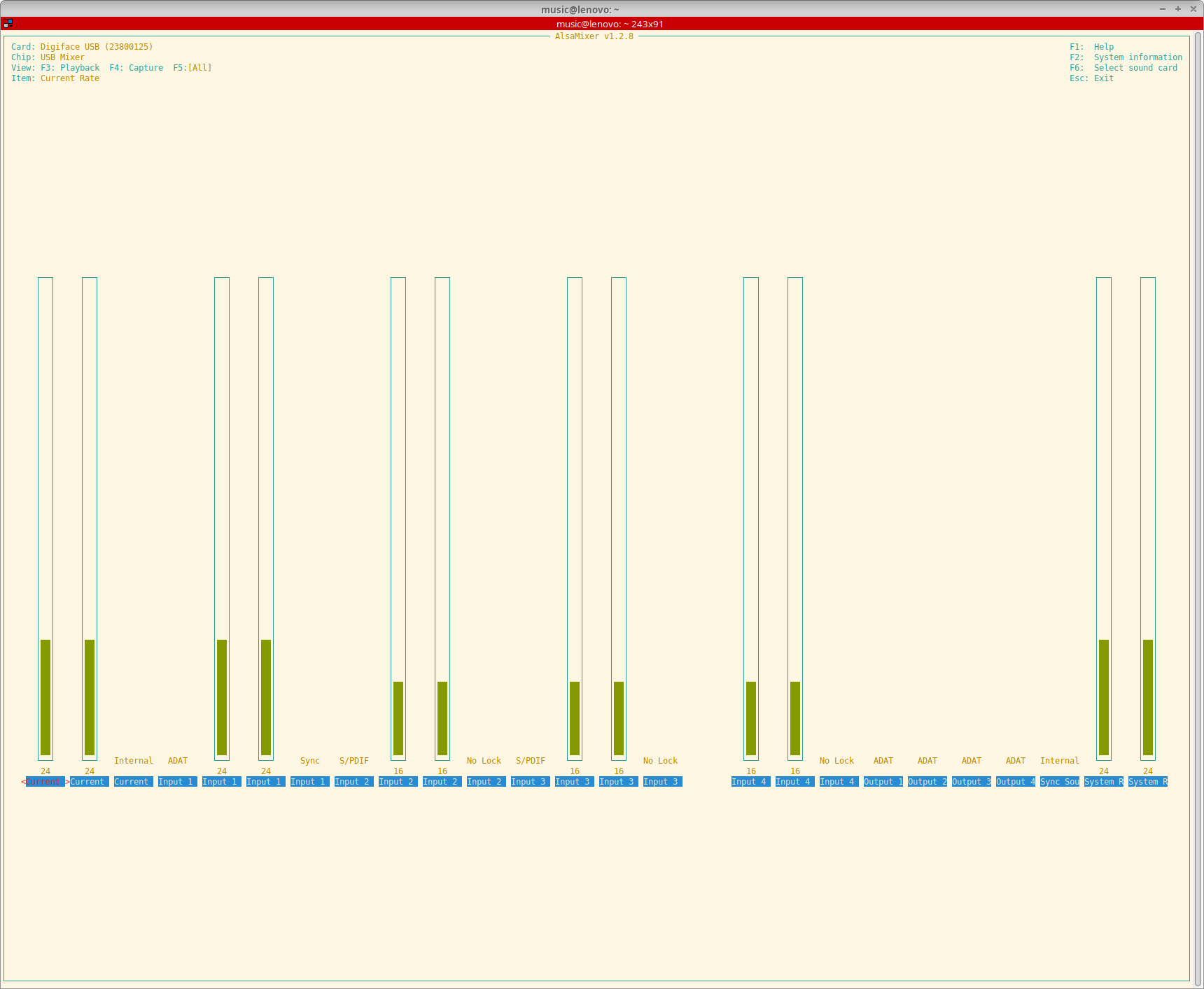
A lot of thanks go out to Asahi Lina for adding support for the RME Digiface USB to the 6.12 kernel. She even added the possibility to control the output format and clock source and to monitor sample rates, input formats, input sync statuses and the current sync source.
Screenshot of AlsaMixer showing all the controls available for the RME Digiface USB
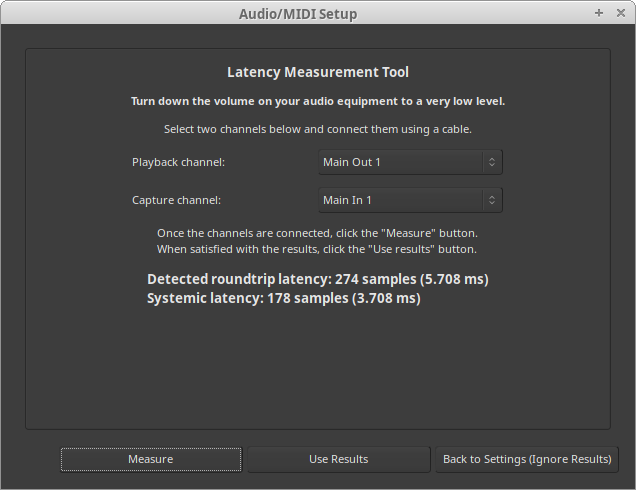
Have yet to test the Digiface USB with more than one ADAT device but with one device (a Behringer ADA8200) everything seems to work really well. Did some round-trip latency tests and with a buffer size of 16 samples and putting TotalMix in DAW mode (which had to be done on a different OS unfortunately but saved another 0.2 ms) I got it down to approximately 4.2 ms. Systemic latency with a buffer size of 16 samples and a sample rate of 48 KHz is 2 ms so somewhere a bit more than 2 ms of additional latency gets added. I think about 1.4 ms gets added by that converters if I did my maths right. According to the specs of the converters they add 22 samples (10 in and 12 out at 48 KHz). That leaves about 0.8 ms unaccounted for. Probably the USB bus buffer or something in the driver stack. Well, no real deal-breaker for me.
Ardour round-trip latency measurement with a buffer size of 32 and a 48KHz sample rate
Because I’m still on Debian 12 I couldn’t fully use the device with PulseAudio though. PulseAudio only supports devices with up to 32 channels in or out and since the Digiface has 34 output channels PulseAudio refused to output any audio through it. As a fix I added the following to the ~/.asoundrc file in my home directory:
pcm.snd_rme_digiface_usb {
type multi
slaves.rme.pcm "snd_output"
slaves.rme.channels 34
bindings.0.slave rme
bindings.0.channel 32
bindings.1.slave rme
bindings.1.channel 33
}
pcm.snd_output {
type hw
card USB23800125
}
To make PulseAudio pick up this extra snd_rme_digiface_usb device I added the following to ~/.config/pulse/default.pa:
# RME Digiface USB
load-module module-alsa-sink device=snd_rme_digiface_usb
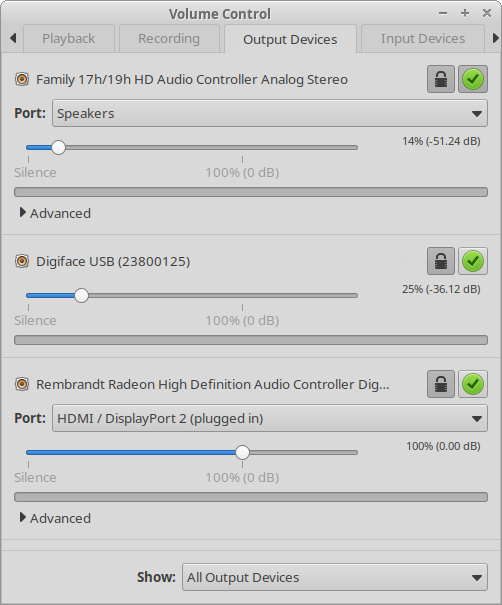
And now I can select the Digiface as an output source and use the phones output in a desktop session.
Screenshot of pavucontrol with the RME Digiface USB right in the middle
Another big bonus is the custom pouch my daughter made for it. I can now toss it in my bike bag without having to worry about dings or scratches.
RME Digiface USB tucked in a custom cotton pouch
RME Digiface USB on top of its custom cotton pouch
As a beta tester for MOD I thought it would be cool to play around with netJACK which is supported on the MOD Duo. The MOD Duo can run as a JACK master and you can connect any JACK slave to it as long as it runs a recent version of JACK2. This opens a plethora of possibilities of course. I’m thinking about building a kind of sidecar device to offload some stuff to using netJACK, think of synths like ZynAddSubFX or other CPU greedy plugins like fat1.lv2. But more on that in a later blog post.
So first I need to set up a sidecar device and I sacrificed one of my RPi’s for that, an RPi 3. Flashed an SD card with Raspbian Jessie Lite and started to do some research on the status of real time kernels and the Raspberry Pi because I’d like to use a real time kernel to get sub 5ms system latency. I compiled real time kernels for the RPi before but you had to jump through some hoops to get those running so I hoped things would have improved somewhat. Well, that’s not the case so after having compiled a first real time kernel the RPi froze as soon as I tried to runapt-get install rt-tests. After having applied a patch to fix how the RPi folks implemented the FIQ system the kernel compiled without issues:
Linux raspberrypi 4.9.33-rt23-v7+ #2 SMP PREEMPT RT Sun Jun 25 09:45:58 CEST 2017 armv7l GNU/Linux
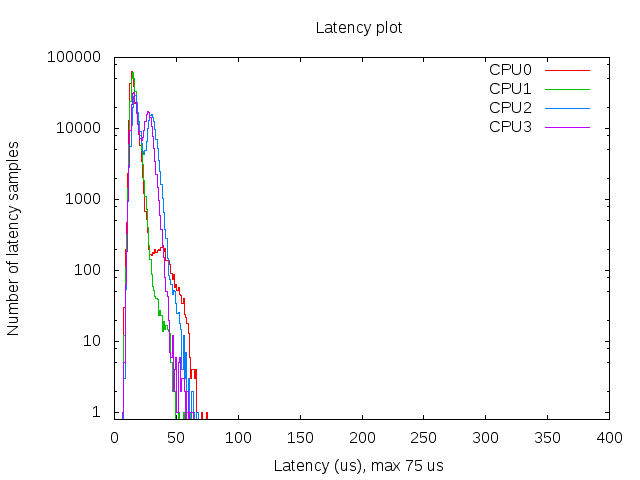
And the RPi seems to run stable with acceptable latencies:
Histogram of the latency on the RPi with a real time kernel during 300000 cyclictest loops
So that’s a maximum latency of 75 µs, not bad. I also spotted some higher values around 100 but that’s still okay for this project. The histogram was created with mklatencyplot.bash. I used a different invocation of cyclictest though:
cyclictest -Sm -p 80 -n -i 500 -l 300000
And I ran hackbench in the background to create some load on the RPi:
(while true; do hackbench > /dev/null; done) &
Compiling a real time kernel for the RPi is still not a trivial thing to do and it doesn’t help that the few howto’s on the interwebs are mostly copy-paste work, incomplete and contain routines that are unclear or even unnecessary. One thing that struck me too is that the howto’s about building kernels for RPi’s running Raspbian don’t mention the make deb-pkg routine to build a real time kernel. This will create deb packages that are just so much easier to transfer and install then rsync’ing the kernel image and modules. Let’s break down how I built a real time kernel for the RPi 3.
First you’ll need to git clone the Raspberry Pi kernel repository:
This will only clone the rpi-4.9.y branch into a directory called linux without any history so you’re not pulling in hundreds of megs of data. You will also need to clone the tools repository which contains the compiler we need to build a kernel for the Raspberry Pi:
The KERNEL variable is needed to create the initial kernel config. The ARCH variable is to indicate which architecture should be used. The CROSS_COMPILE variable indicates where the compiler can be found. The CONCURRENCY_LEVEL variable is set to the number of cores to speed up certain make routines like cleaning up or installing the modules (not the number of jobs, that is done with the -j option of make).
Now that the environment variables are set we can create the initial kernel config:
cd linux
make bcm2709_defconfig
This will create a .config inside the linux directory that holds the initial kernel configuration. Now download the real time patch set and apply it:
cd ..
wget https://www.kernel.org/pub/linux/kernel/projects/rt/4.9/patch-4.9.33-rt23.patch.xz
cd linux
xzcat ../patch-4.9.33-rt23.patch.xz | patch -p1
Most howto’s now continue with building the kernel but that will result in a kernel that will freeze your RPi because of the FIQ system implementation that causes lock ups of the RPi when using threaded interrupts which is the case with real time kernels. That part needs to be patched so download the patch and dry-run it:
cd ..
wget https://www.osadl.org/monitoring/patches/rbs3s/usb-dwc_otg-fix-system-lockup-when-interrupts-are-threaded.patch
cd linux
patch -i ../usb-dwc_otg-fix-system-lockup-when-interrupts-are-threaded.patch -p1 --dry-run
You will notice one hunk will fail, you will have to add that stanza manually so note which hunk it is for which file and at which line it should be added. Now apply the patch:
And add the failed hunk manually with your favorite editor. With the FIQ patch in place we’re almost set for compiling the kernel but before we can move on to that step we need to modify the kernel configuration to enable the real time patch set. I prefer doing that with make menuconfig. You will need the libncurses5-dev package to run this commando so install that with apt-get install libncurses5-dev. Then select Kernel Features - Preemption Model - Fully Preemptible Kernel (RT) and select Exit twice. If you’re asked if you want to save your config then confirm. In the Kernel features menu you could also set the the timer frequency to 1000 Hz if you wish, apparently this could improve USB throughput on the RPi (unconfirmed, needs reference). For real time audio and MIDI this setting is irrelevant nowadays though as almost all audio and MIDI applications use the hr-timer module which has a way higher resolution.
With our configuration saved we can start compiling. Clean up first, then disable some debugging options which could cause some overhead, compile the kernel and finally create ready to install deb packages:
make clean
scripts/config --disable DEBUG_INFO
make -j$(nproc) deb-pkg
Sit back, enjoy a cuppa and when building has finished without errors deb packages should be created in the directory above the linux one. Copy the deb packages to your RPi and install them on the RPi with dpkg -i. Open up /boot/config.txt and add the following line to it:
kernel=vmlinuz-4.9.33-rt23-v7+
Now reboot your RPi and it should boot with the realtime kernel. You can check with uname -a:
Linux raspberrypi 4.9.33-rt23-v7+ #2 SMP PREEMPT RT Sun Jun 25 09:45:58 CEST 2017 armv7l GNU/Linux
Since Rasbian uses almost the same kernel source as the one we just built it is not necessary to copy any dtb files. Also running mkknlimg is not necessary anymore, the RPi boot process can handle vmlinuz files just fine.
The basis of the sidecar unit is now done. Next up is tweaking the OS and setting up netJACK.
Edit: there’s a thread on LinuxMusicians referring to this article which already contains some very useful additional information.
Today I got a Tascam US-144MKII from a colleague because he couldn’t use it anymore with Mac OSX. Apparently this USB2.0 audio interface stopped working on El Capitan. Tascam claims they’re working on a driver but they’re only generating bad publicity with that announcement it seems. So he gave it to me, maybe it would work on Linux.
Tascam US-144MKII
First thing I did was plugging it in. The snd_usb_122l module got loaded but that was about it. So much for plug and play. There are reports though that this interface should work so when I got home I started digging a bit deeper. Apparently you have to disable the ehci_hcd USB driver, which is actually the USB2.0 controller driver, and force the US-144MKII to use the uhci_hcd USB1.1 driver instead so that it thinks it’s in USB1.1 mode. This limits the capabilities of the device but my goal for today was to get sound out of this interface, not getting the most out of it.
I quickly found out that on my trusty XPS13 forcing USB1.1 was probably not going to work because it only has USB3.0 ports. So I can disable the ehci_hcd driver but then it seems the xhci_hcd USB3.0 driver takes over. And disabling that driver effectively disables all USB ports. So I grabbed an older notebook with USB2.0 ports and disabled the ehci_hcd driver by unbinding it since it’s not compiled as a module. Unbinding a driver is done by writing the system ID of a device to a so-called unbind file of the driver that is bound to this device. In this case we’re interested in the system ID’s of the devices that use the ehci_hcd driver which can be found in /sys/bus/drivers/ehci-pci/:
This will unbind the ehci_hcd driver from the device with system ID 0000:00:1a.7 which in this case is an USB2.0 controller.When plugging in the USB interface it now got properly picked up by the system and I was greeted with an active green USB led on the interface as proof.
$ cat /proc/asound/cards
0 [Intel ]: HDA-Intel - HDA Intel
HDA Intel at 0xf4800000 irq 46
1 [US122L ]: USB US-122L - TASCAM US-122L
TASCAM US-122L (644:8020 if 0 at 006/002
So ALSA picked it up as a device but it doesn’t show up in the list of sound cards when issuing aplay -l. This is because you have to tell ALSA to talk to the device in a different way then to a normal audio interface. Normally an audio interface can be addressed by using the hw plugin which is the most low-level ALSA plugin that does nothing more than talking to the driver and this is what most applications use, including JACK. The US-144MKII works differently though, its driver snd_usb_122l has to be accessed with the use of the usb_stream plugin which is part of the libasound2-plugins package and that allows you to set a PCM device name that can be used with JACK for instance. This can be done with the following .asoundrc file that you have to create in the root of your home directory:
pcm.us-144mkii {
type usb_stream
card "US122L"
}
ctl.us-144mkii {
type hw
card "US122L"
}
What we do here is creating a PCM device called us-144mkii and coupling that to the card name we got from cat /proc/asound/cards which is US122L. Of course you can name the PCM device anything you want. Almost all other examples name it usb_stream but that’s a bit confusing because that is the name of the plugin and you’d rather have a name that has some relation to the device you’re using. Also practically all examples use card numbers. But who says that the USB audio interface will always be card 0, or 1. It could also be 2, or 10 if you have 9 other audio interfaces. Other examples work around this by fixing the order of the numbers that get assigned to each available audio interface by adjusting the index parameter for the snd_usb_122l driver. But why do that when ALSA also accepts the name of the card? This also makes thing a lot easier to read, it’s now clear that we are coupling the PCM name us-144mkii to the card named US122L. And we’re avoiding having to edit system-wide settings. The ctl stanza is not strictly necessary but it prevents the following warning when starting JACK:
ALSA lib control.c:953:(snd_ctl_open_noupdate) Invalid CTL us-144mkii
control open "us-144mkii" (No such file or directory)
So with the .asoundrc in place you can try starting JACK:
$ jackd -P85 -t2000 -dalsa -r48000 -p512 -n2 -Cus-144mkii -Pus-144mkii
jackd 0.124.2
Copyright 2001-2009 Paul Davis, Stephane Letz, Jack O'Quinn, Torben Hohn and others.
jackd comes with ABSOLUTELY NO WARRANTY
This is free software, and you are welcome to redistribute it
under certain conditions; see the file COPYING for details
no message buffer overruns
JACK compiled with System V SHM support.
loading driver ..
apparent rate = 48000
creating alsa driver ... us-144mkii|us-144mkii|512|2|48000|0|0|nomon|swmeter|-|32bit
configuring for 48000Hz, period = 512 frames (10.7 ms), buffer = 2 periods
ALSA: final selected sample format for capture: 24bit little-endian in 3bytes format
ALSA: use 2 periods for capture
ALSA: final selected sample format for playback: 24bit little-endian in 3bytes format
ALSA: use 2 periods for playback
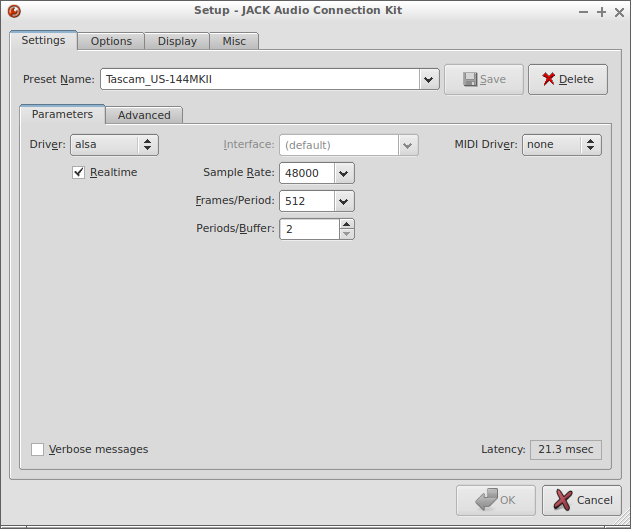
This translates to the following settings in QjackCtl:
QjackCtl Settings – Parameters
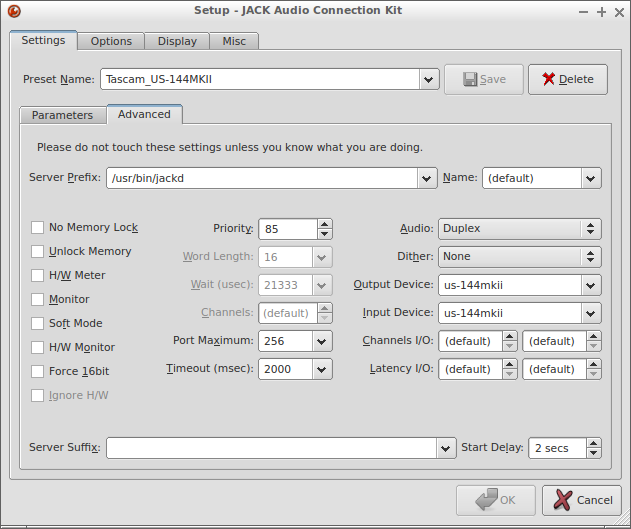
QjackCtl Settings – Advanced
Don’t expect miracles of this setup. You won’t be able to achieve super low-latencies but at least you can still use your Tascam US-144MKII instead of having to give it away to a colleague.
Next step for the synth module project was to get the Raspberry Pi 2 to run in a stable manner. It seems like I’m getting close or that I’m already there. First I built a new RT kernel based on the 4.1.7 release of the RPi kernel. Therefore I had to checkout an older git commit because the RPi kernel is already at 4.1.8. The 4.1.7-rt8 patchset applied cleanly and the kernel booted right away:
pi@rpi-jessie:~$ uname -a
Linux rpi-jessie 4.1.7-rt8-v7 #1 SMP PREEMPT RT Sun Sep 27 19:41:20 CEST 2015 armv7l GNU/Linux
After cleaning up my cmdline.txt it seems to run fine without any hiccups so far. My cmdline.txt now looks like this:
With a buffer of 64 frames latency is very low and so far I haven’t run into instruments that cause a lot of xruns with this buffer size. Not even the multi-layered ones from Will Godfrey.
So I guess it’s time for the next step, creating a systemd startup unit so that ZynAddSubFX starts at boot. And it would be nice if USB MIDI devices would get connected automatically. And if you could see somehow which instrument is loaded, an LCD display would be great for this. Also I’d like to have the state of the synth saved, maybe by saving an .xmz file whenever there’s a state change or on regular intervals. And the synth module will need a housing or casing. Well, let’s get the software stuff down first.
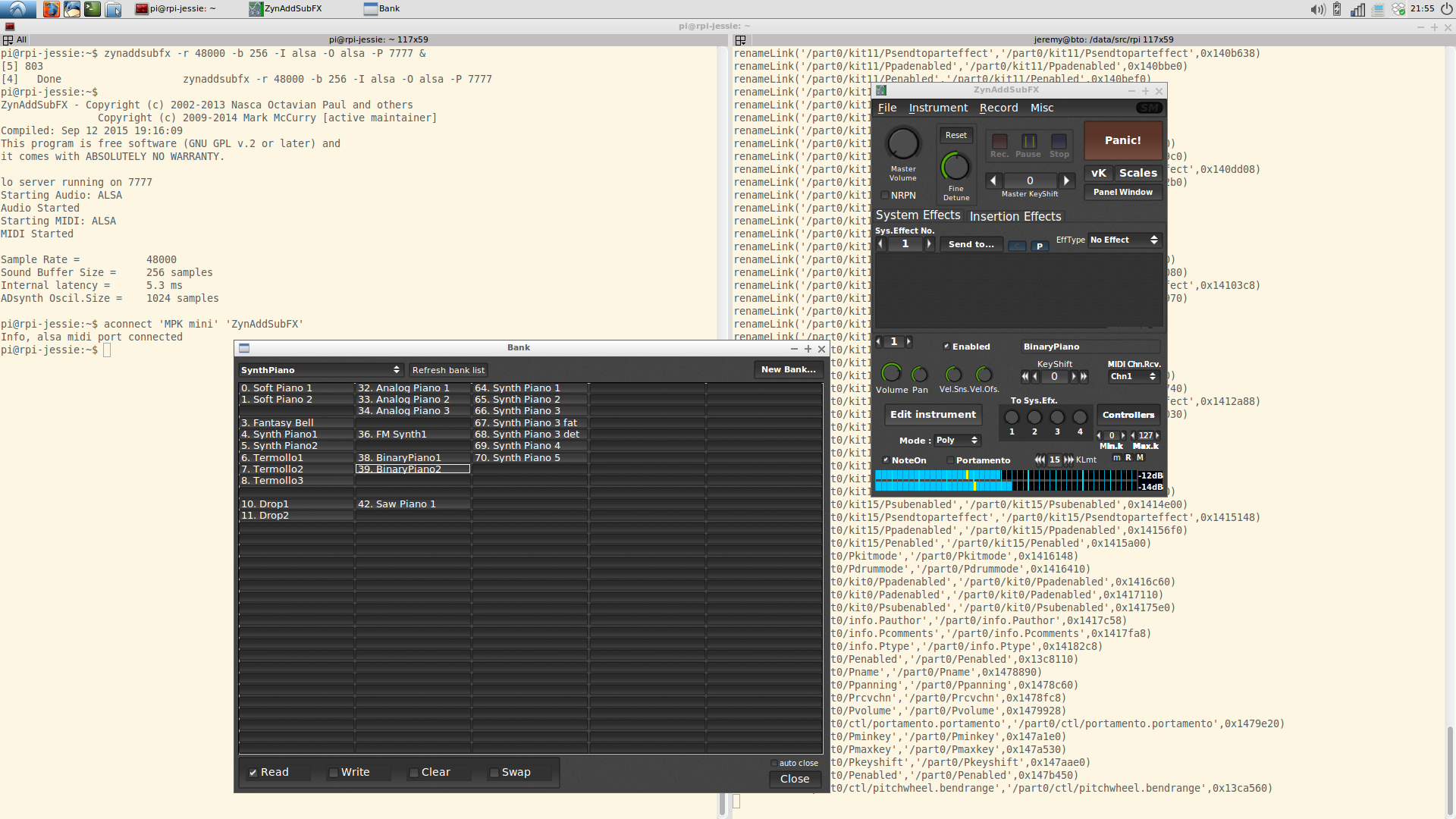
Ever since I did an acid set with my brother in law at the now closed bar De Vinger I’ve been playing with the idea of creating some kind of synth module out of a Raspberry Pi. The Raspberry Pi 2 should be powerful enough to run a complex synth like ZynAddSubFX. When version 2.5.1 of that synth got released the idea resurfaced again since that version allows to remote control a running headless instance of ZynAddSubFX via OSC that is running on for instance a Raspberry Pi. I looked at this functionality before a few months ago but the developer was just starting to implement this feature so it wasn’t very usable yet.
But with the release of ZynAddSubFX 2.5.1 the stabilitity of the zynaddsubfx-ext-gui utility has improved to such an extent that it’s a very usable tool. In the above screenshot you can see zynaddsubfx-ext-gui running on my notebook with Ubuntu 14.04 controlling a remote instance of ZynAddSubFX running on a Raspberry Pi.
So basically all the necessary building blocks for a synth module are there. Coupled with my battered Akai MPK Mini and a cheap PCM2704 USB DAC I started setting up a test setup.
For the OS on the Raspberry Pi 2 I chose Debian Jessie as I feel Raspbian isn’t getting you the most out of your Pi. It’s running a 4.1.6 kernel with the 4.1.5-rt5 RT patch set, which applied cleanly and seems to run so far:
pi@rpi-jessie:~$ uname -a
Linux rpi-jessie 4.1.6-rt0-v7 #1 SMP PREEMPT RT Sun Sep 13 21:01:19 CEST 2015 armv7l GNU/Linux
This isn’t a very clean solution of course so let’s hope a real 4.1.6 RT patch set will happen or maybe I could give the 4.1.6 PREEMPT kernel that rpi-update installed a try. I packaged a headless ZynAddSubFX for the RPi on my notebook using pbuilder with a Jessie armhf root and installed the package for Ubuntu 14.04 from the KXStudio repos. I slightly overclocked the RPi to 1000MHz and set the CPU scaling governor to performance. The filesystem is Ext4, mounted with noatime,nobarrier,data=writeback.
To get the USB audio interface and the USB MIDI keyboard into line I had to add the following line to my /etc/modprobe.d/alsa.conf file:
This makes sure the DAC gets loaded as the first audio interface, so with index 0. Before adding this line the Akai would claim index 0 and since I’m using ZynAddSubFX with ALSA it couldn’t find an audio interface. But all is fine now:
pi@rpi-jessie:~$ cat /proc/asound/cards
0 [DAC ]: USB-Audio - USB Audio DAC
Burr-Brown from TI USB Audio DAC at usb-bcm2708_usb-1.3, full speed
1 [mini ]: USB-Audio - MPK mini
AKAI PROFESSIONAL,LP MPK mini at usb-bcm2708_usb-1.5, full speed
So no JACK as the audio back-end, the output is going directly to ALSA. I’ve decided to do it this way because I will only be running one single application that uses the audio interface so basically I don’t need JACK. And JACK tends to add a bit of overhead, you barely notice this on a PC system but on small systems like the Raspberry Pi JACK can consume a noticeable amount of resources. To make ZynAddSubFX use ALSA as the back-end I’m starting it with the -O alsa option:
The -r option sets the sample rate, the -b option sets the buffer size, -I is for the MIDI input and the -P option sets the UDP port on which ZynAddSubFX starts listening for OSC messages. And now that’s the cool part. If you then start zynaddsubfx-ext-gui on another machine on the network and tell it to connect to this port it starts only the GUI and sends all changes to the GUI as OSC messages to the headless instance it is connected to:
zynaddsubfx-ext-gui osc.udp://10.42.0.83:7777
Next up is stabilizing this setup and testing with other kernels or kernel configs as the kernel I’ve cooked up now isn’t a viable long-term solution. And I’d like to add a physical MIDI in and maybe a display like described on the Samplerbox site. And the project needs a casing of course.
For years I’ve used Focusrite Firewire interfaces, first the Saffire Pro 10 IO and after that its successor, the Saffire Pro 40. Both great devices but recently I decided to make the switch to USB. The reason was twofold:
I was barely using more than 2 ins or outs simultaneously
Firewire is being phased out and my notebooks don’t have any Express Card slots either, only USB ports
The Pro 40 isn’t very portable
So when switching to USB I would need:
Same or better quality preamps and AD/DA convertors
At least 2 ins and outs
Portability
Possibility to achieve similar latencies as with the Pro 40
Works well with Linux
This narrowed down the choice significantly. I could go for a Focusrite Scarlett but from what I found on the net there were some issues with these devices. I’ve also looked at some Presonus devices but actually I had already set my mind on a different device: the RME Babyface.
RME Babyface
So when I found a webshop that offered the Babyface at a reduced price (almost 15% off) I put my Focusrite up for sale and bought the Babyface. The Focusrite was sold within a week and the Babyface easily met my expectations:
When in CC (Class Compliant) mode it works out of the box
It’s highly portable, the Babyface is actually specifically made for this purpose as it comes with a nice pouch
It has 2 ins and outs and the great thing is that it’s possible to extend the IO via ADAT
The preamps and AD/DA converters are simply top notch, they’re so good that I’m considering switching cans and studio monitors as this device is merciless, it simply doesn’t work well with my current setup
When connected to an USB3 port (XHCI) the Babyface can run with nominal latencies of 0.5ms (this is with 8 samples), i.e. it beats the other two OS’s mentioned on the RME product page
I can live with not being able to control the device from within Linux, almost all settings can be done on the device itself. Upgrading the firmware can be done with a VM so that’s covered too. The only real drawbacks are that it’s an USB device so it’s a bit more picky with regard to your system setup and it consumes a bit more CPU compared to Firewire. But all in all this is a great sounding device that works well with Linux when in CC mode and it fits my specific user case very well.
Got my new workstation last week. Ultimately I decided to opt for a Dell notebook system with Linux pre-installed. So that left me only one single option: the XPS 13 Developer Edition, aka Sputnik 3. After having worked with it for a week I can only say I’m very, very happy with it. Unboxing it was a joy in itself, unwrapping the amazingly sleek machine and booting it for the first time. The XPS 13 comes with Ubuntu 12.04 LTS pre-installed which is just fine for me, especially given the fact that everything seems to work flawlessly so far. I haven’t rebooted it for days for example, suspending it works brilliantly and when I open the lid the device wakes up instantly, even after having it closed for days. And even though it has an i7 CPU it can run for hours on a full battery. The touch screen is a nice bonus but I haven’t really made use of it yet, it could be quite cool for live perfomances though. I’ve tested the touch screen with seq24 and it’s quite awesome to be able to trigger sequences by pressing the sequences on your screen.
Dell XPS 13 Developer Edition
I did try a fresh install but it would take me a bit too much time to get everything working properly so in the end I opted for sticking with the default install and install the Lubuntu desktop on top of it. And the default install doesn’t get in the way so I’m all set. I’m now looking for a nice keyboard and mouse to pair with the notebook, I’d greatly appreciate any suggestions. I had already ordered a Logitech K290 but I’m sending it back because it has the function keys swapped with the media keys and I just can’t work with that. Switching tty’s with Fn+Ctrl+F[:digit:] is just impossible to do with that keyboard. I could’ve tried swapping the keys but I’ve already filled in the RMA form and repacked the keyboard so it’s going back.
Next up is configuring it for making music. I’m thinking about purchasing a new USB audio interface, preferably USB2.0, that matches well with this machine. Suggestions are very welcome. I’ve looked at the Focusrite Scarlett 2i4 but a recent thread on LAU raised some doubts. We’ll see, it’s something for later, for now I’m extremely happy with my new work horse.
Finally got around troubleshooting the issues I was facing with JACK on my notebook, a BTO that is actually a Clevo W170ER. Somehow I couldn’t go lower than -p128 with USB audio interfaces. When I thought I had tried every option, even disabling hyperthreading, I noticed two unidentified entries in my lsusb output:
Bus 001 Device 003: ID 8087:07da Intel Corp. Bus 002 Device 003: ID 5986:0401 Acer, Inc
The first entry is a Bluetooth adapter and the second entry is a webcam. Both devices are unnecessary when making music so I thought, why not unbind them. First I had to figure out their respective bus ID’s:
Since the Bluetooth adapter sits on bus 1 and the webcam on bus two their respective ID’s should be 1-1 and 2-1. So I echoed the ID’s to the unbind file in the same directory:
$ echo -n "1-1" | sudo tee /sys/bus/usb/drivers/usb/unbind $ echo -n "2-1" | sudo tee /sys/bus/usb/drivers/usb/unbind
Good riddance:
$ lsusb Bus 001 Device 002: ID 8087:0024 Intel Corp. Integrated Rate Matching Hub Bus 002 Device 002: ID 8087:0024 Intel Corp. Integrated Rate Matching Hub Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Then I started JACK again with -p64 using an USB audio interface connected to bus 3 (so no rate matching hub in between) and no more xruns, not even with a generic kernel and using WiFi and all. Next hurdle is the onboard sound. Below -p128 I get bursts of massive xruns and so far I didn’t manage to pinpoint the culprit.
Edit #1: I’ve found out that the Bluetooth adapter is the main bottleneck. Also, by echoing the aformentioned ID’s (1-1 and 2-1) you disable the whole USB bus apparently. To disable just the USB device echo the last ID in the respective path names, so for the Bluetooth adapter that’s 1-1.3 and for the webcam 2-1.6. This way you can still use the USB bus on which these devices are residing. In my case disabling the whole bus is not an option, this would mean I’d have to connect all my USB interfaces to bus 3 (bus 4 doesn’t have any external inputs) which could result in these devices getting in each other’s way with regard to bandwidth. After echoing the ID’s the output of the tree command looks like this:
Edit #2: unbinding drivers like described above won’t persist across reboots. If you’d like to make the unbinding persistent you could add the unbind command to /etc/rc.local or create a script that runs at login. There are other options of course like blacklisting the Bluetooth drivers.